文章基本信息
- 文章名称:Day-Night Cross-domain Vehicle Re-identification
- 发表会议/年份:CVPR 2024
- 作者:Hongchao Li, Jingong Chen, Aihua Zheng, Yong Wu, Yonglong Luo
- 单位:Anhui Normal University, Anhui University
摘要
本文提出了一种新颖的昼夜双域调制(DNDM)车辆再识别框架,解决了跨昼夜性能问题(之前工作都是在良好光照下)。它包括一个夜间域眩光抑制模块和一个双域结构增强模块,以增强低光环境下的车辆特征。通过开发跨域类别感知模块,本文促进了两个域中外观和结构特征的互动,并提供了包含昼夜图像的新数据集DN-Wild和平衡数据集DN-348。实验结果表明,该框架在昼夜跨域车辆再识别中的鲁棒性。
之前工作存在的问题
- 跨昼夜性能的忽视
- 热(近)红外摄像机的高成本和环境光干扰(无法像行人重识别转化为VIReID)
- 数据集中的样本不平衡
- 跨域特征差异带来的挑战
- 类别内差异大导致的泛化能力不足
主要贡献/创新
- 我们提供了两个标准化基准数据集,DN-Wild和DN-348,以促进DN-ReID的研究。这些基准数据集将免费向学术研究公众开放。
- 我们提出了昼夜双域调制(DNDM)框架,集成了眩光抑制、结构增强和类别感知的训练,以动态调制昼夜跨域车辆特征。
- 在具有挑战性的基准数据集DN-348和DN-Wild上进行的详尽实验验证了我们的DNDM在昼夜跨域车辆ReID问题上的优越性能和潜力。
方法
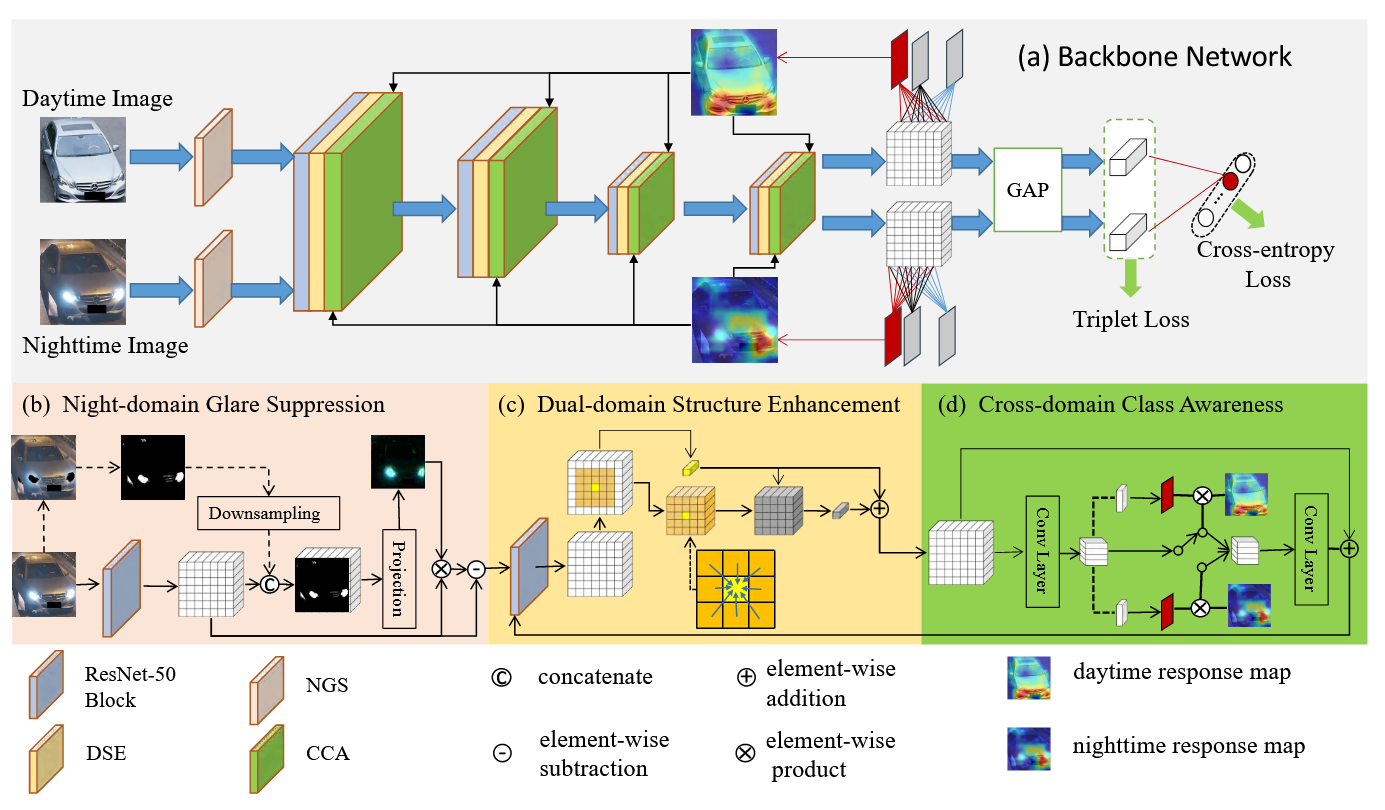
3.1 Model Architecture
提出的DNDM框架利用ResNet-50作为骨干网络,从昼夜图像中提取特征。为了解决夜间眩光问题,框架引入了夜间域眩光抑制(Night-domain Glare Suppression, NGS)模块。双域结构增强(Dual-domain Structure Enhancement, DSE)模块聚合局部窗口的梯度,捕捉多样的结构表示。跨域类别感知(Cross-domain Class Awareness, CCA)模块促进昼夜跨域特征的相互作用,增强外观和结构表示在骨干网络各个阶段的有效利用。
3.2 Baseline
昼夜跨域车辆再识别(DN-ReID)旨在检索昼夜环境中感兴趣的车辆。给定一对车辆图像 ,其中 和 分别是输入的白天和夜间车辆图像, 是相关的车辆身份标签。由骨干网络编码的相应多阶段特征张量表示为 ,其中 , 。如图3(a)所示,遵循ResNet-50骨干网络,我们使用全局平均池化(GAP)层来获得相应的特征向量 。网络随后针对交叉熵损失 和三元组损失 进行优化。交叉熵损失公式如下:
其中 表示预测分类结果的全连接层,Softmax 是获取归一化概率的函数。值得注意的是, 和 共享相同的 层。三元组损失公式如下:
其中 表示每个训练批次内的一个困难三元组。对于白天锚定样本 , 来自相应的夜间正样本集, 来自白天负样本集。对于夜间锚定样本 , 来自相应的白天正样本集, 来自夜间负样本集。 表示正/负样本对的成对距离,margin = 0.3 表示三元组距离边界。
尽管上述骨干网络可以提取车辆特征,但它并不能有效解决车灯眩光、低光环境和域差异带来的挑战。为了解决DN-ReID中的挑战,我们引入了夜间域眩光抑制(NGS)模块、双域结构增强(DSE)模块和跨域类别感知(CCA)模块。
总结
昼夜跨域车辆再识别(DN-ReID)提出了利用骨干网络提取昼夜环境中的车辆特征,优化交叉熵损失和三元组损失。然而,传统方法无法有效解决车灯眩光、低光环境和域差异的问题。为此,本文引入了夜间域眩光抑制(NGS)模块、双域结构增强(DSE)模块和跨域类别感知(CCA)模块,以应对这些挑战。
3.3 NGS
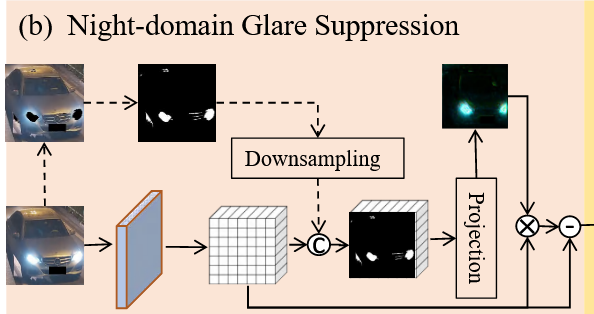
借鉴研究[2, 19]中强调的视觉提示概念,视觉提示的整合在识别任务的确切细节时至关重要。我们提出了一个夜间域眩光抑制(Night-domain Glare Suppression, NGS)模块,该模块利用眩光提示引导注意力到无眩光区域,并减少车灯眩光的影响。给定一个夜间车辆图像 ,我们首先通过卷积块提取特征张量 :
其中 表示一个7×7卷积操作,BN表示批归一化操作,ReLU表示修正线性单元, 表示2×2最大池化操作。
同时,我们将夜间车辆图像 转换为灰度图像 。然后,我们应用亮度阈值220来识别夜间图像中的高亮区域。在识别高亮区域后,我们将相邻像素组合成区域,同时丢弃像素较少的区域。最后,我们从初始夜间图像中获得二进制掩码 ,其中1表示受眩光影响的像素,0表示未受眩光影响的像素。该二进制掩码作为输入包含在眩光抑制模块中,并与特征张量 进行调制。具体来说,我们将特征张量 与二进制掩码 连接,然后将它们输入到一个可学习的投影向量 中:
其中 表示学习到的域抑制掩码,Sigmoid指的是S形函数。
除了夜间图像外,我们的NGS模块还受到白天图像的指导。基本思想是利用一个虚拟掩码 来提示无眩光白天特征和有眩光夜间特征之间的差异:
在此过程中,输入之一是 和 的连接。另一个输入是一个无眩光的白天特征张量 ,与一个全零掩码 连接。基于域抑制掩码 ,最终的抑制过程可以表示为:
其中 表示经过眩光抑制操作后的昼夜特征, 是用于平衡原始特征和弱化特征的超参数。图3(b)展示了我们NGS模块的结果,说明了眩光区域的成功分离。在执行上述操作后,我们将 反馈到骨干网络中以获取相应的特征张量 。
总结
本文提出的夜间域眩光抑制(NGS)模块利用视觉提示有效减少车灯眩光的影响。通过对夜间图像进行特征提取、灰度转换和亮度阈值处理,我们生成了二进制掩码来识别受眩光影响的区域。该掩码用于调制特征张量,从而增强无眩光区域的特征表示。NGS模块还结合了白天图像信息,以提示昼夜特征之间的差异。最终,通过这些操作,成功实现了昼夜特征的分离和增强,显著提高了车辆再识别的准确性。
代码实现
1 |
3.4 DSE
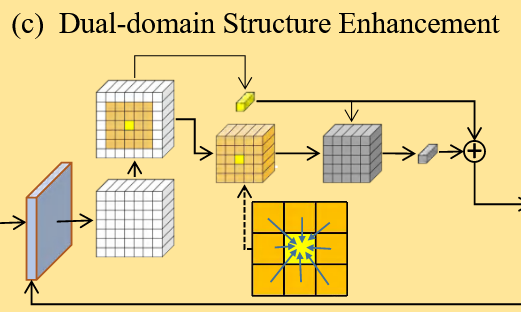
常见的车辆再识别网络主要关注提取车辆外观特征。然而,外观特征容易受到低光环境的影响。为了提高昼夜车辆图像对的特征一致性,我们引入了双域结构增强(Dual-domain Structure Enhancement, DSE)模块。DSE模块的主要思想是通过逐像素梯度从外观特征中提取结构信息。具体来说,DSE模块处理中间特征图 ,并计算每个像素位置 及其周围区域大小为 的逐像素非负局部梯度 :
其中 表示通道维度的索引, 表示每个像素 在其周围区域的邻居位置。区域大小为 ,。此外,我们提出了一种特征加权操作,将详细的局部梯度整合成一个简明的结构描述符,使得能够同时从两个域中学习几何结构:
其中 具有与原始特征张量 相同的空间和通道尺寸。梯度引导的特征加权操作将邻居特征聚合成结构特征,从而将其空间维度从 降至 。这种转换将原始局部梯度 转换为结构描述符 。简而言之,结构描述符由加权的外观描述符导出。然后,我们利用结构描述符作为外观描述符的附加输入:
其中 表示结构增强操作后的昼夜特征,超参数 用于平衡原始特征和增强特征。
代码实现
1 | class GradientComputation4(nn.Module): |
总结
双域结构增强(DSE)模块通过逐像素梯度从车辆图像的外观特征中提取结构信息,以提高昼夜图像对的特征一致性。DSE模块计算每个像素及其周围区域的局部梯度,将局部梯度整合成结构描述符,并将其作为附加输入,增强外观特征表示。通过这种方式,DSE模块在低光环境下改善了车辆再识别的鲁棒性和准确性。
3.5 CCA
在我们的网络中,我们首先使用ResNet-50从昼夜跨域车辆图像中提取外观特征。然后,我们应用眩光抑制模块来减少夜间图像中车灯眩光的影响。此外,我们引入结构增强模块来改进外观特征。然而,这些模块未能考虑昼夜域之间的差异。
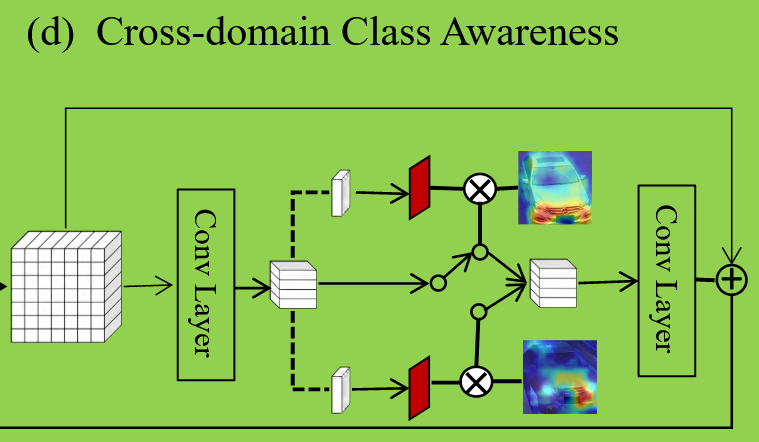
为了应对昼夜域间差异,我们为DN-ReID问题引入了跨域类别感知(Cross-domain Class Awareness, CCA)模块。给定昼夜跨域车辆特征 ,其中 ,我们使用卷积层将其转换为投影 。这个调整旨在匹配全连接层 的输入大小,如公式(1)所述。数学表达如下:
其中 表示1×1卷积操作,BN表示批归一化操作。受类激活映射(CAM)操作的启发,CAM可以突出类特定的判别区域。我们引入投影 来计算昼夜图像的类激活映射:
其中 代表训练集中类的总数。对于第 类的类激活映射分别表示为 和 ,其中 表示车辆身份标签。Sigmoid函数用于归一化CAM。
为了促进昼夜跨域特征的相互作用,我们建议在训练阶段交换昼夜样本的类感知信息:
其中 表示元素级别的乘法。重要的是,这种交换过程仅在训练阶段发生,测试阶段不交换类激活映射。为了确保 和 具有相同的通道数,我们将 操作纳入CCA模块。结果特征表示为:
总体损失
我们采用广泛使用的ResNet-50作为骨干网络。在第一个块之前集成了提出的夜间域眩光抑制(NGS)模块。此外,我们在每个卷积块之后集成了双域结构增强(DSE)模块和跨域类别感知(CCA)模块。整个网络以端到端方式进行训练。总体损失函数如下:
总结
跨域类别感知(CCA)模块旨在解决昼夜域之间的差异。通过将车辆特征转换为投影并计算类激活映射,CCA模块促进了昼夜样本之间的特征交互。结合夜间域眩光抑制(NGS)模块和双域结构增强(DSE)模块,CCA模块增强了车辆再识别系统在昼夜跨域场景中的鲁棒性。通过端到端训练,网络在特征提取和域适应方面表现出色,显著提升了再识别的准确性。
实验结果
DN-348上的测试结果
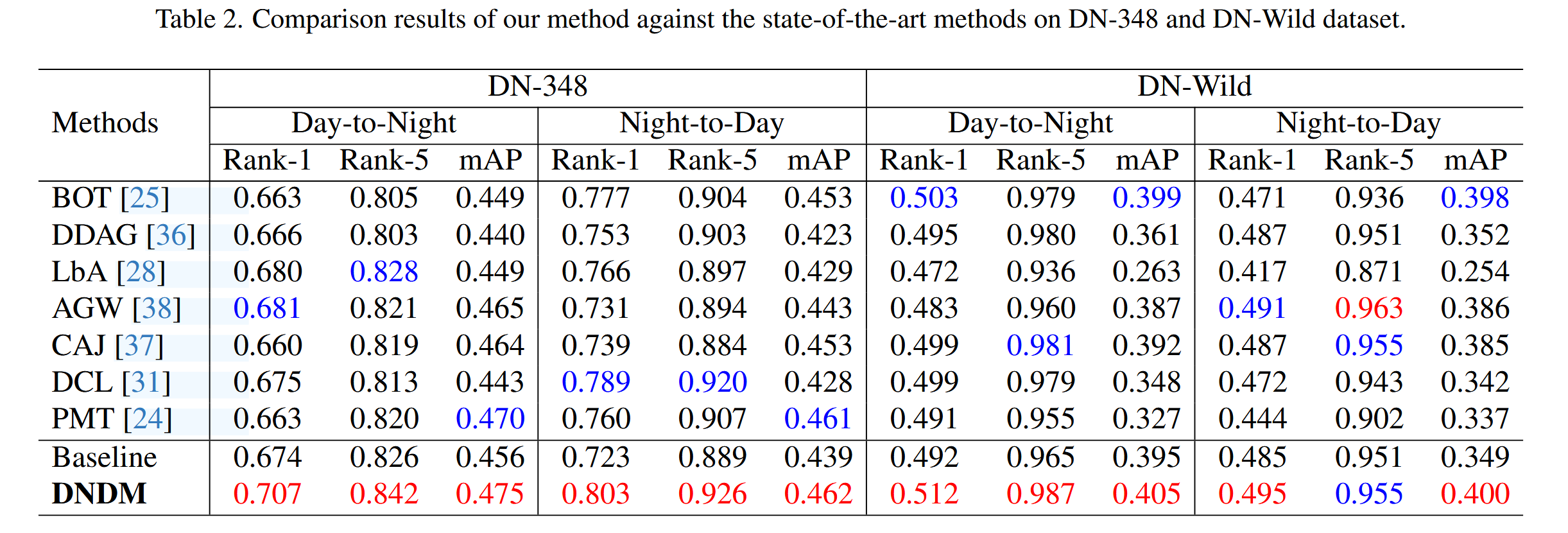
比较了DNDM和最先进的VI-ReID方法在DN-348数据集上的性能。DNDM在处理夜间车辆图像时表现更佳,尤其是在昼夜转换和夜昼转换设置中显著优于VI-ReID方法。通过夜间领域眩光抑制和双领域结构增强,DNDM有效提升了夜间车辆图像的特征学习能力。研究表明,DN-ReID在夜间匹配车辆图像方面具有挑战性,但潜力巨大。
DN-Wild上的测试结果
本文比较了DNDM和最先进的方法在DN-Wild数据集上的性能。DNDM在昼夜转换和夜昼转换设置中均表现出色,显著优于ReID强基线BOT。通过眩光抑制、结构增强和类别感知的训练,DNDM有效地学习了昼夜跨域特征。然而,PMT在DN-Wild数据集上的表现不如在DN-348数据集上,这表明仅考虑域间差异是不够的,需解决样本不平衡问题。总体上,DNDM在大规模数据集上显示了强泛化能力。
消融实验
每个组件的有效性
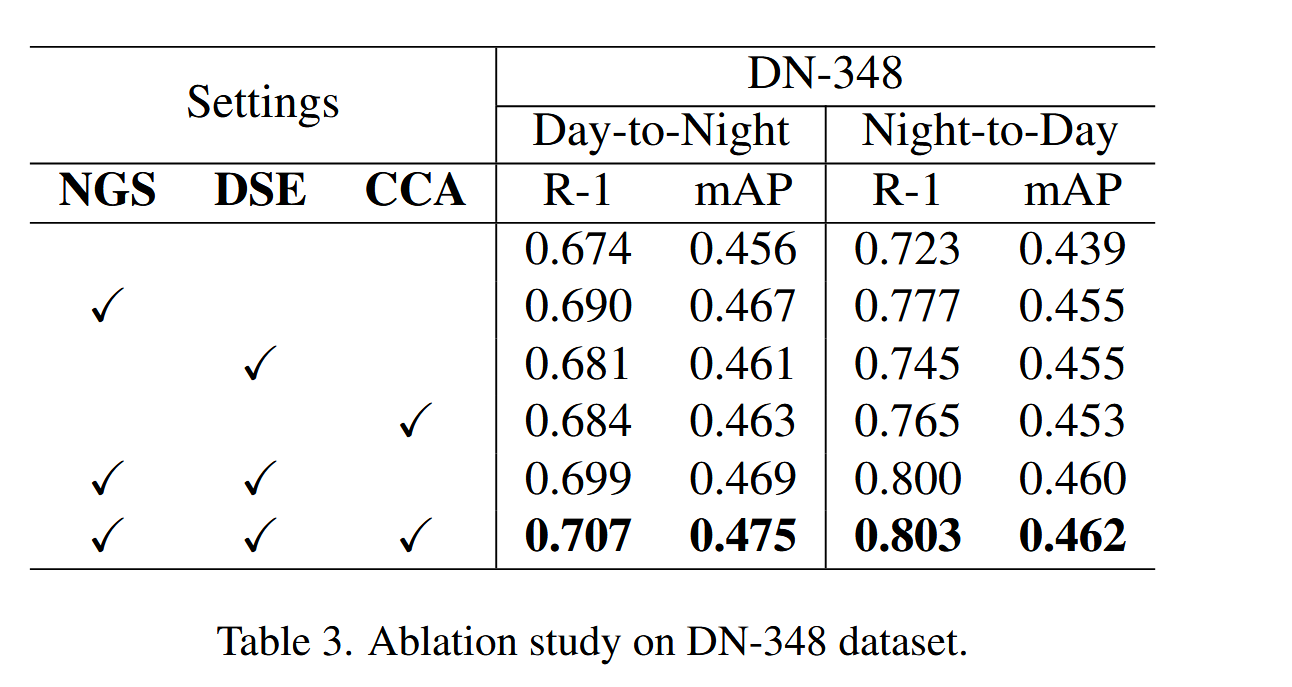
通过在DN-348数据集上的消融研究,本文验证了NGS、DSE和CCA模块对模型性能的显著贡献。单独启用NGS模块时,Rank-1性能达到69.0%;启用NGS和DSE模块时,性能提升至69.9%;三者结合时,性能达到70.7%。这些结果证明了各模块单独及联合使用时的一致性性能提升。
ResNet-50的哪个阶段插入DSE模块和CCA模块的影响
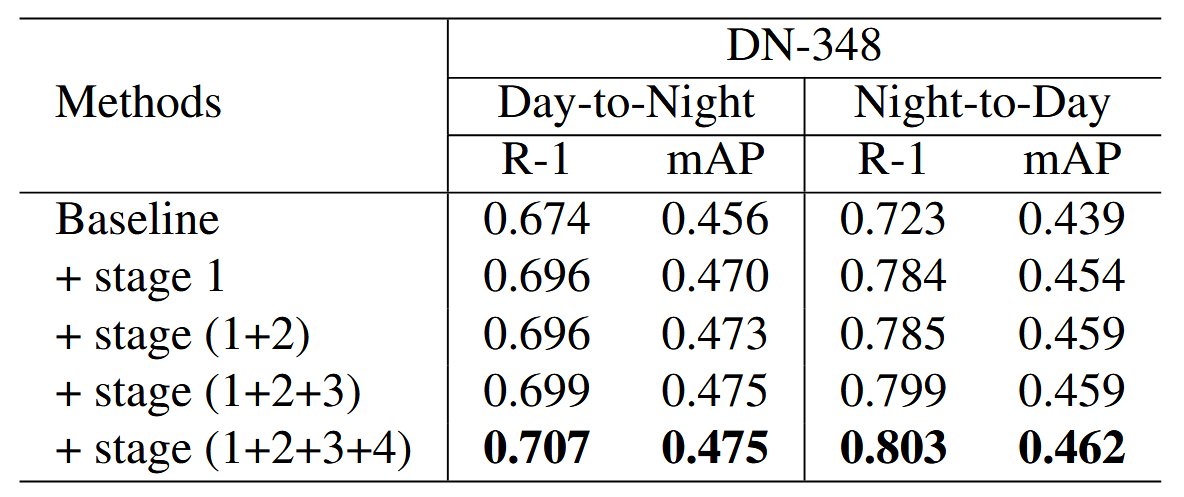
本文分析了在ResNet-50的不同阶段插入DSE和CCA模块对性能的影响。实验表明,随着模块在ResNet-50各阶段的逐步集成,DN-348数据集的Rank-1分数从69.6%提升至70.7%,mAP从47.0%提升至47.5%。这些结果验证了昼夜双域调制框架在学习昼夜跨域信息以提升DN-ReID性能方面的有效性。
Other Analysis
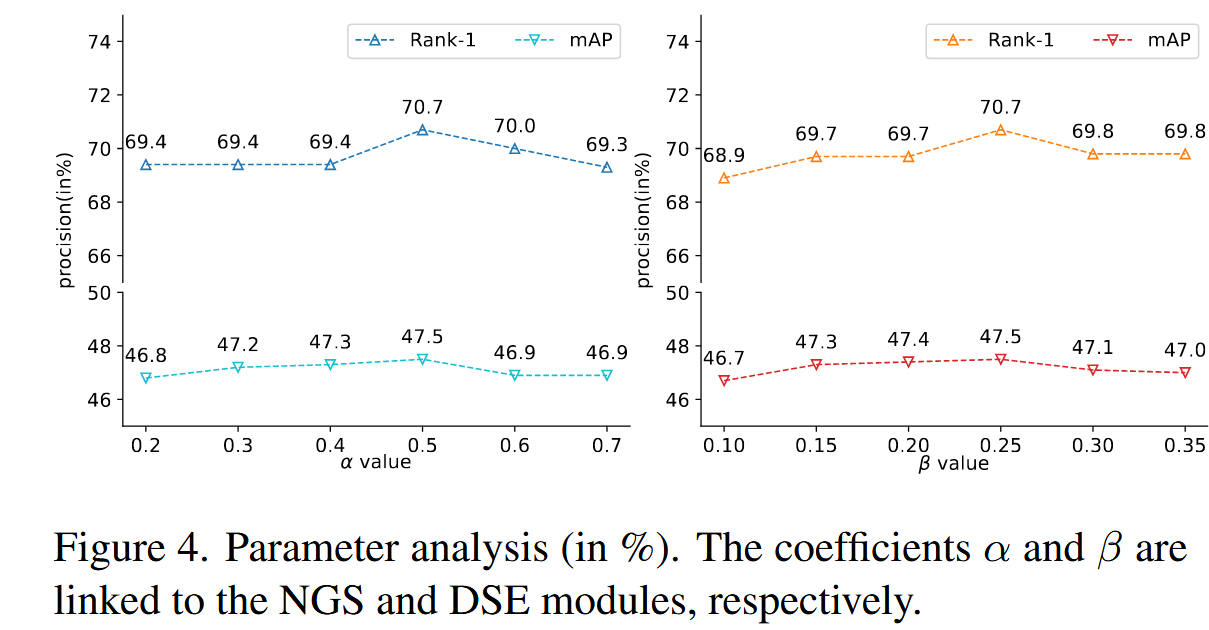
超参数分析:为了评估两个超参数的影响,我们进行了定量比较并在图4中报告了结果。α和β的不同值显着影响NGS和DSE模块的性能。据观察,当 α 和 β 值分别设置为 0.5 和 0.25 时,可实现最佳性能。
可视化研究:为了进一步分析我们DNDM的有效性,我们在DN-348数据集上进行实验,以计算跨身份和同身份距离的频率。图5(a,b)分别显示了基线方法和提出的DNDM获取的距离分布。将图5(b)与图5(a)进行比较,我们可以观察到δ1 < δ2。这表明使用所提出的方法,跨身份和同身份距离显著分离。
此外,我们使用T-SNE方法在二维特征空间中可视化了20辆车的特征分布。在图5(c,d)中,可以明显看出,所提出的DNDM显著减少了同一身份白天和夜间图像之间的距离,并成功地最小化了域间差异。
总结
据我们所知,这是首个解决昼夜跨域车辆重识别(DN-ReID)问题的研究。我们贡献了两个新的DN-ReID数据集,并提出了一种创新的DN-ReID方法。与白天到白天的车辆重识别相比,DN-ReID面临车灯眩光、低光环境和域间差异带来的挑战。因此,我们提出了昼夜双域调制(DNDM)网络,该网络结合了眩光抑制、结构增强和类别感知的学习,以动态调制昼夜跨域车辆特征。广泛的实验表明,所提出方法具有良好的性能。
此外,基于我们的研究,我们强调了DN-ReID的几个重要发现。首先,为夜间的车辆图像注释是一项挑战。其次,增强夜间车辆图像中的特征被证明是有效的。最后,考虑昼夜跨域数据识别相同ID的能力是值得的。未来,我们将增强上述组件,以推进DN-ReID的最新技术,并探索无标签的DN-ReID。