卷积神经网络结构介绍
如果用全连接神经网络处理大尺寸图像具有三个明显的缺点:
(1)首先将图像展开为向量会丢失空间信息;
(2)其次参数过多效率低下,训练困难;
(3)同时大量的参数也很快会导致网络过拟合。
而使用卷积神经网络可以很好地解决上面的三个问题。
卷积神经网络的提出参考了人眼的局部相关性,人眼用于识别物体也是先看一个局部,根据一些特称才能辨别这个物体是什么,特征的识别和像素点的排列位置和情况有关。
根据局部相关性提出的卷积神经网络结构
卷积运算
首先我们使用几张图来直观感受一下卷积是如何运算的
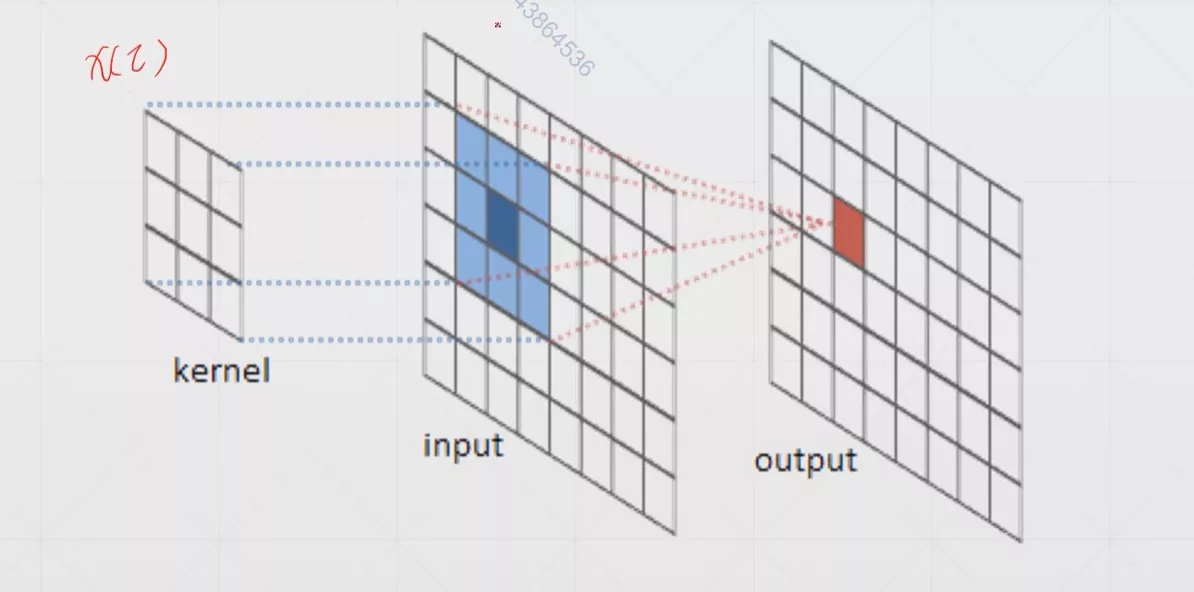
最左边的那个叫做卷积核
更多更详细关于卷积神经网络的基础知识可以访问如下这篇博客:深度学习:卷积神经网络(CNN
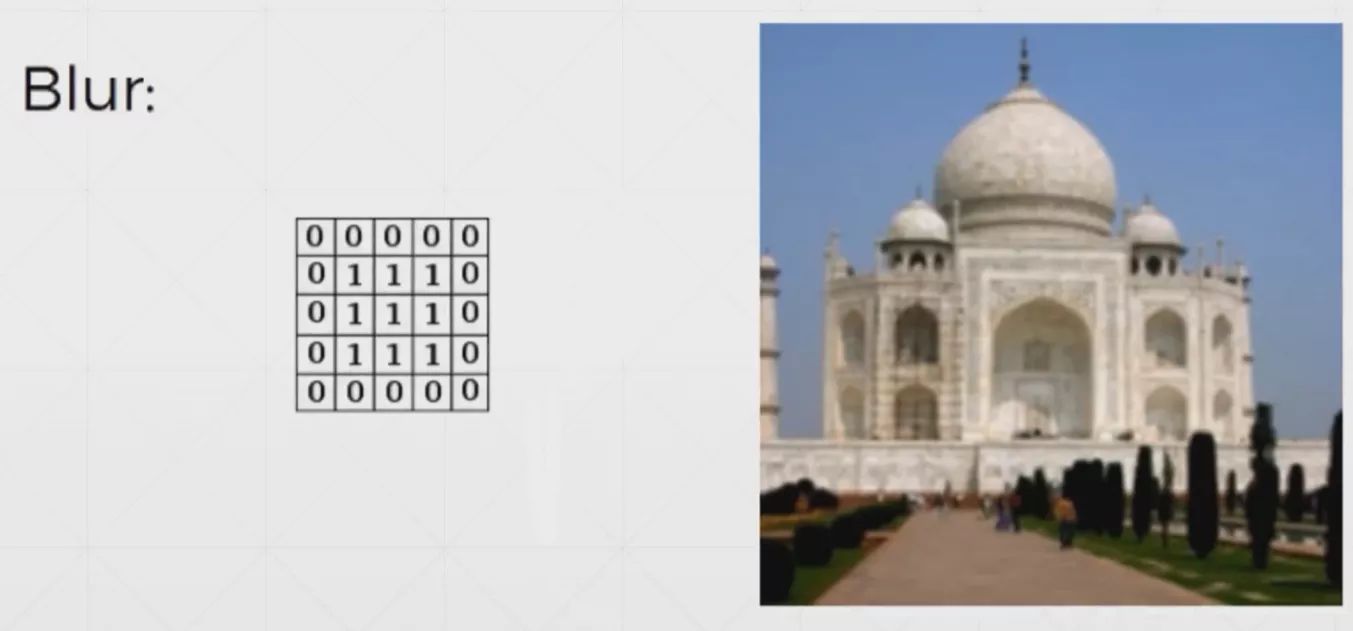
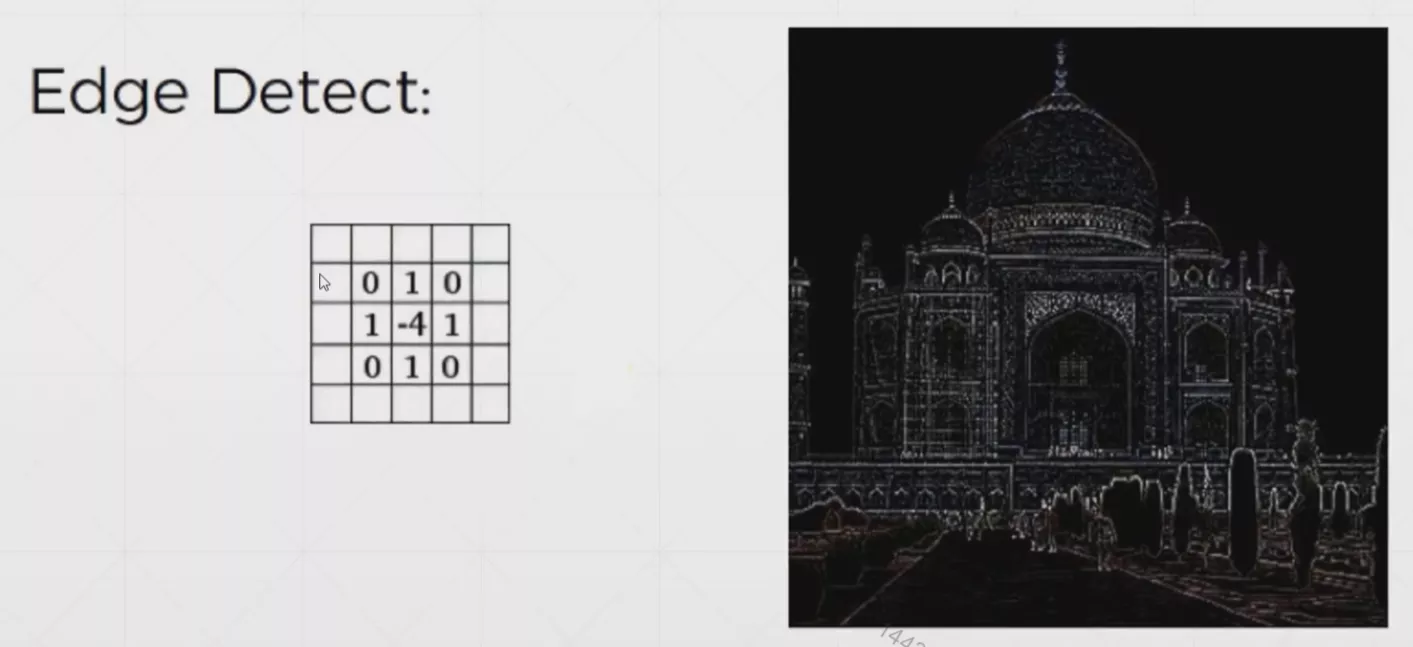
常用卷积核

概念解析
输入通道(Input_channels):输入有多少个通道(多少层输入),比如如果我们使用的是黑白照片,那么就只有一个通道;如果我们使用的是rgb彩色照片那么就有三个通道。
**核通道(Kernel_channels):**卷积核有多少个通道数量。
核大小(Kernel_size):卷积核的大小,一般是3×3
步长(Stride):每次卷积核移动的步长,一般默认是1
填充(Padding):为了保证卷积运算每次卷积完成以后输入输出图片大小相同,我们可能需要在图片周围填充一圈0。
但是一般情况下都是指后者。
因此对于b个28×28,3通道的输入x: [b,3,28,28]如果我们采用16个3*3的卷积核,则对于一个卷积核他的size是one-k: [3,3,3],对于16个k的总size是multi-k: [16,3,3,3],因为有16个卷积核所以偏置也有16个bias: [16](这里运用了广播)。最终的输出是out: [b,16,28,28](考虑了padding)
PyTorch实现
了解了基本的卷积神经网络后,下面我们尝试使用PyTorch简单的实现一个简单的二维卷积神经网络,所使用的函数是nn.Conv2d其中第一个参数表示的是输入的通道数,后面的参数表示的是输出的通道数。
1 | In [3]: import torch.nn as nn |
我们也可以使用下面的代码来看看最后一次这个layer中存放了什么样的weight和bias(接上面的代码)
1 | In [16]: layer.weight |
以上是类API的写法,PyTorch也提供函数API,具体代码如下:
1 | In [3]: import torch.nn.functional as F |
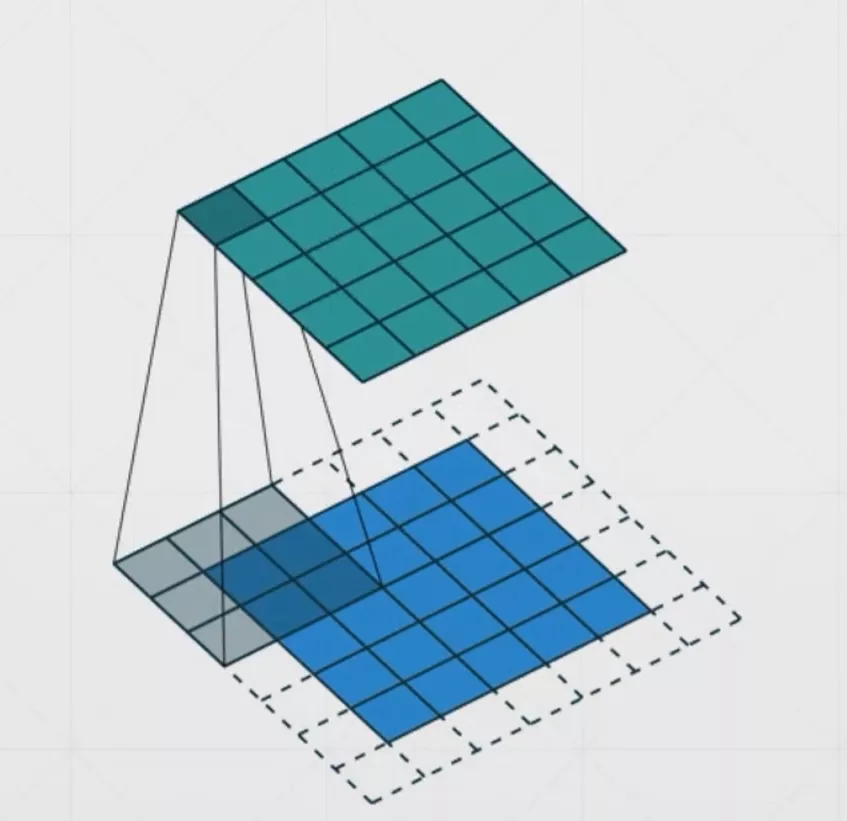
池化层与采样
下采样(Downsample)
就是将下面的这个大矩阵变成上面的那个小矩阵,其实下采样和是缩小图片有点像
Max Pooling
Max Pooling和下采样类似,但是是每次观察一个区域后取该区域值最大的值为该区域的采样值

Pooling
PyTorch 实现
PyTorch同样提供两种类型的API,这里所使用的函数是nn.MaxPool2d和nn.AvgPool2d和avg_pool2d和max_pool2d
1 | In [3]: import torch.nn as nn |
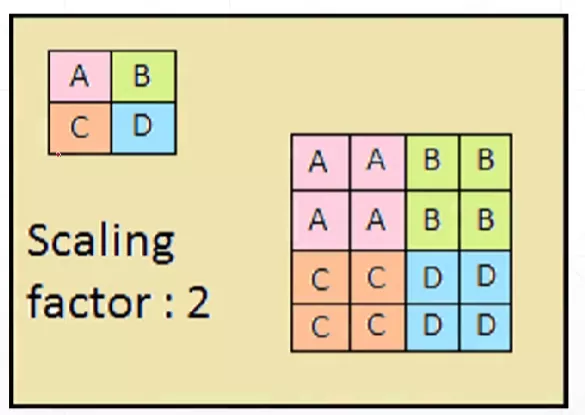
上采样(Upsample)
就是将上面的这个小矩阵变成下面的那个大矩阵,相当于图片的放大,和下采样正好相反
PyTorch 实现
上采样所使用的函数是interpolate函数
1 | In [3]: import torch.nn.functional as F |
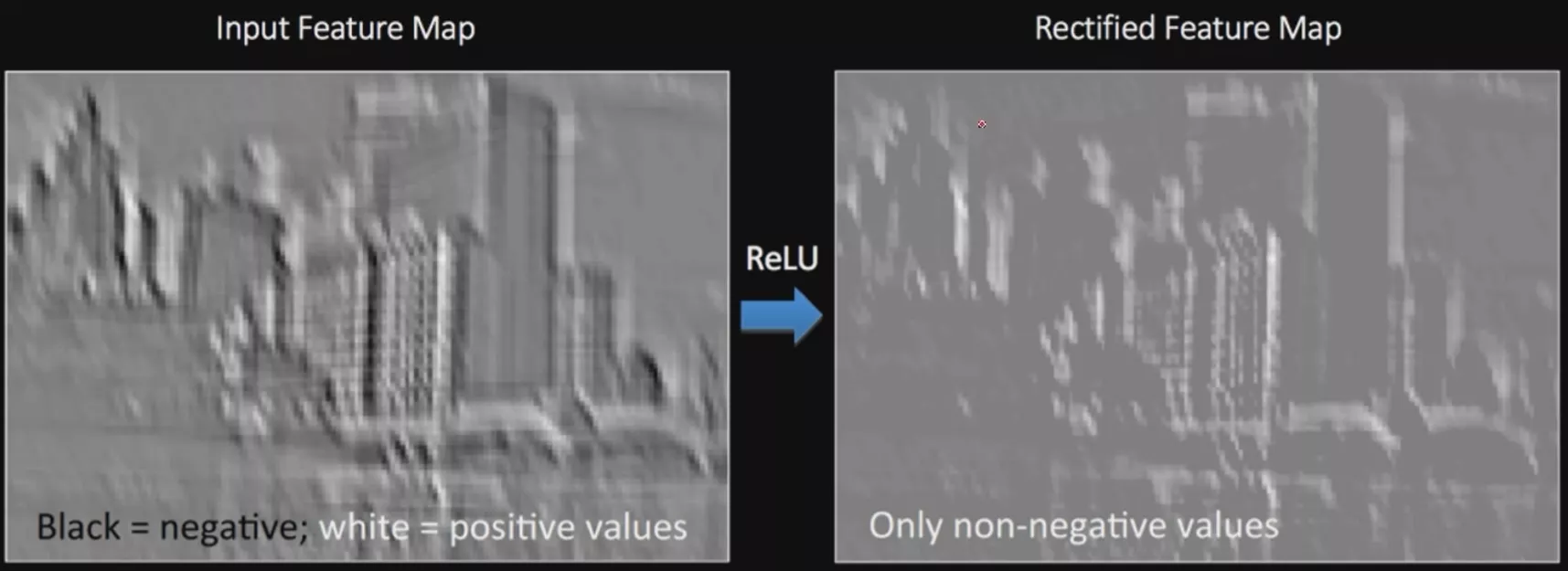
ReLU
卷积神经网络的ReLU函数和之前全连接神经网络所说的ReLU函数一样,在这里是被用于去除响应过小的点。
PyTorch实现
和原来全连接神经网络使用的函数一模一样
1 | In [3]: import torch.nn as nn |
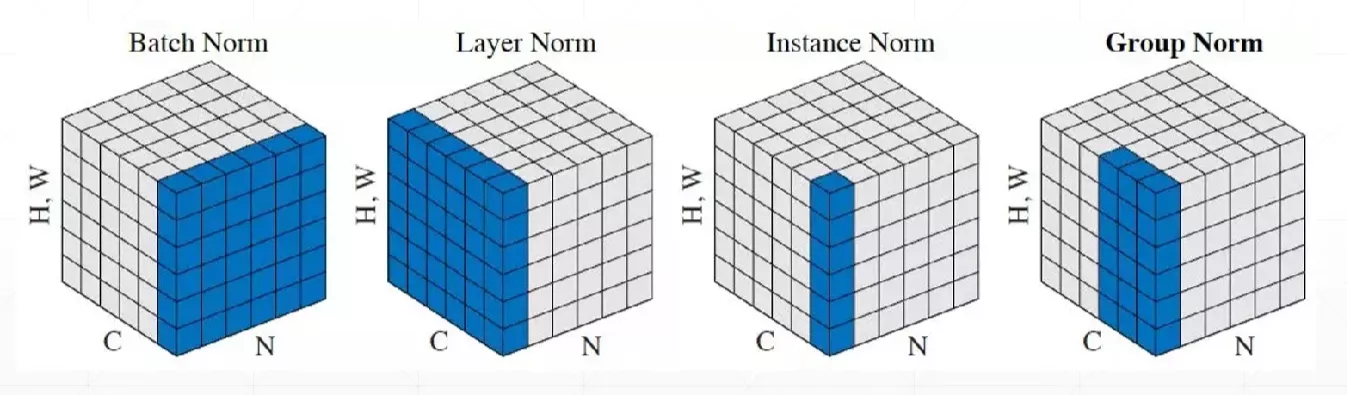
Batch-Norm(归一化)
norm其实归一化就是特征缩放(feature scaling),一般情况我们将特征缩放成以0为均值1为方差的情况。
Batch norm在卷积神经网络中是指,对所有样本的相同层进行归一化处理。
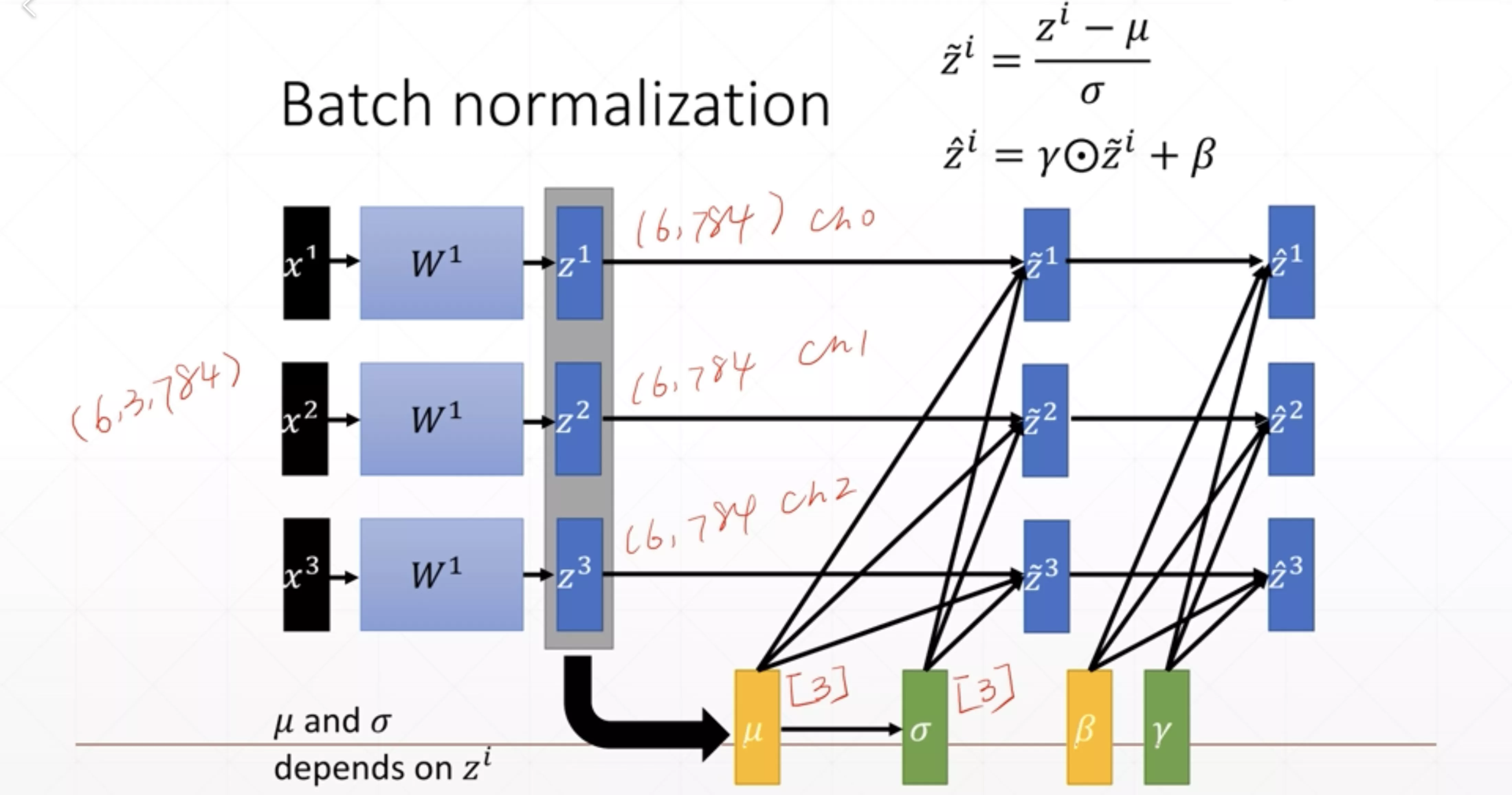
是要参与反向传播的,是不参与反向传播的,是运行中统计出来的数据。当前的计算也和上一次的值有关(指数加权平均)
PyTorch 实现
下面实现一个全连接层的Batchnorm,所使用的函数是torch.nn.BatchNorm1d,输入参数表示有多少个特征,在下面的例子中是有16个特征
1 | In [3]: x=torch.rand(100,16)+0.5 |
running_mean,running_var统计的是当前输入的数据的均值和方差的
可以发现running_mean一开始并没有直接到真实数据的均值,这就是因为每一次计算的均值和前一次的均值是有关系的缘故。所以当我们这样计算多次后running_mean才会逐渐接近真实的均值(见下面的代码)
1 | In [3]: x=torch.randn(100,16)+0.5 |
下面我们进一步来看看BatchNorm对于2d的数据是如何进行操作的,这里所使用的函数是BatchNorm2d,参数代表的含义是有多少个通道。
1 | In [3]: import torch.nn as nn |
使用vars可以打出层的所有信息。
1 | In [12]: vars(layer) |
因为Batchnorm层在训练模式和测试模式下的行为有所差别,所以在进行测试时,要使用eval把Batchnorm层的状态转换过来(从训练模式转换为测试模式)。因为test的时候只有一个样本,所以是无法被统计的。一般这个时候这两个值会被赋值为全局的值。
合理使用BatchNorm可以加快收敛速度并且提高准确度,而且使用了以后模型的鲁棒性会提升(模型更加稳定)
经典的卷积神经网络

其中几个转折点
- AlexNet(2012)
- ZFNet(2013)
- VGG(2014)
- GoogLeNet(2014)
- ResNet※
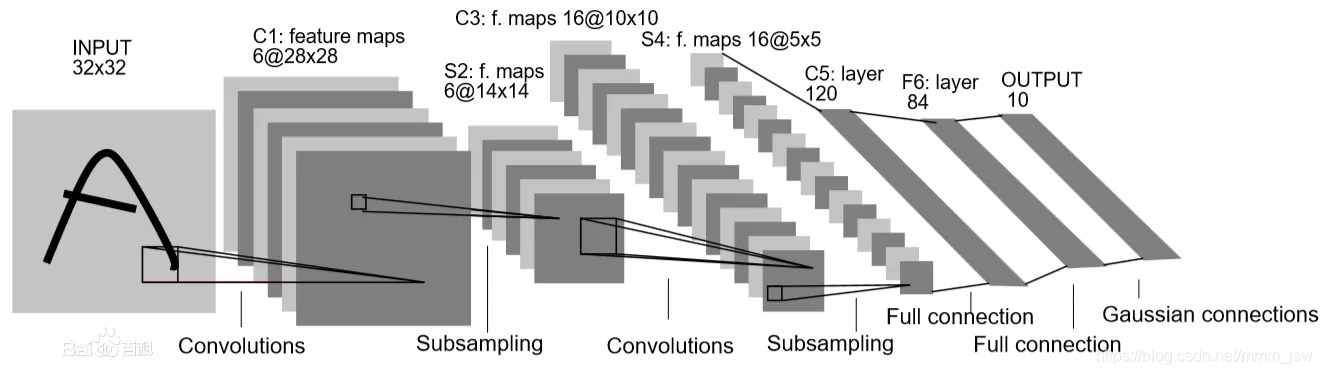
LeNet-5
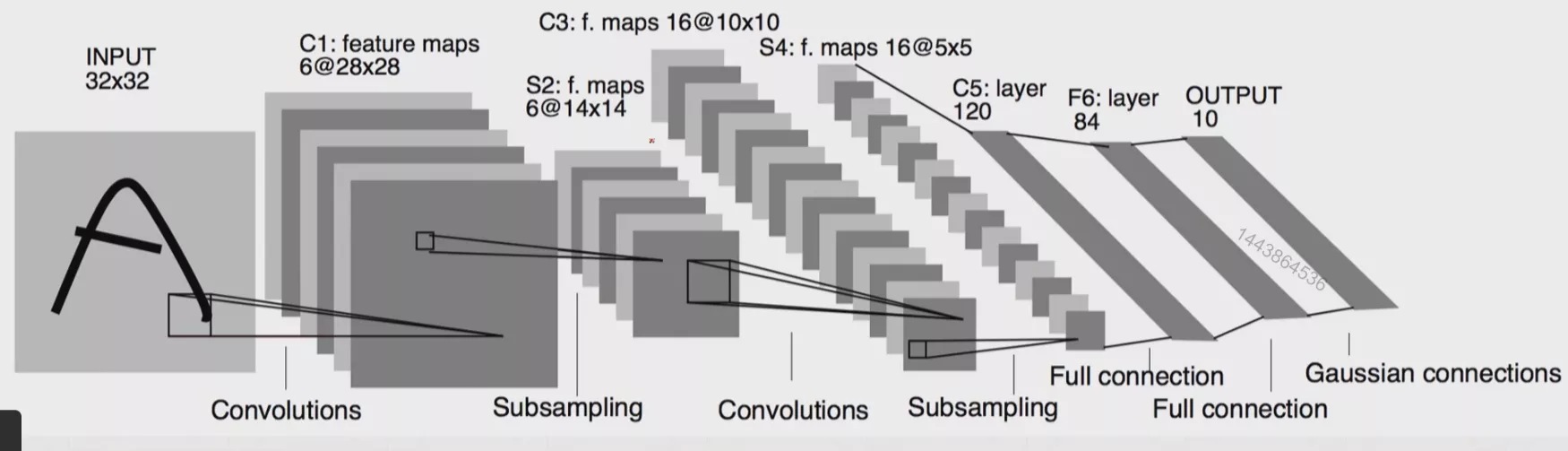
LeNet由Yann Lecun 提出,是一种经典的卷积神经网络,是现代卷积神经网络的起源之一。Yann将该网络用于邮局的邮政的邮政编码识别,有着良好的学习和识别能力。LeNet又称LeNet-5,具有一个输入层,两个卷积层,两个池化层,3个全连接层(其中最后一个全连接层为输出层)。
LeNet-5是一种经典的卷积神经网络结构,于1998年投入实际使用中。该网络最早应用于手写体字符识别应用中。普遍认为,卷积神经网络的出现开始于LeCun 等提出的LeNet 网络(LeCun et al., 1998),可以说LeCun 等是CNN 的缔造者,而LeNet-5 则是LeCun 等创造的CNN 经典之作 。

网络结构如下图所示,先是一个卷积层,然后是一个下采样,然后又是一个卷积层,然后又是一个下采样,最后三个就是三个全连接层。
AlexNet
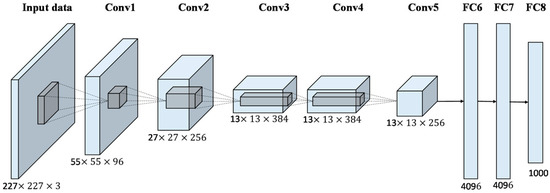
AlexNet是2012年ImageNet竞赛冠军获得者Hinton和他的学生Alex Krizhevsky设计的。也是在那年之后,更多的更深的神经网络被提出,比如优秀的VGG,GoogLeNet。 这对于传统的机器学习分类算法而言,已经相当的出色。
AlexNet中包含了几个比较新的技术点,也首次在CNN中成功应用了ReLU、Dropout和LRN等Trick。同时AlexNet也使用了GPU进行运算加速。
AlexNet将LeNet的思想发扬光大,把CNN的基本原理应用到了很深很宽的网络中。AlexNet主要使用到的新技术点如下:
(1)成功使用ReLU作为CNN的激活函数,并验证其效果在较深的网络超过了Sigmoid,成功解决了Sigmoid在网络较深时的梯度弥散问题。虽然ReLU激活函数在很久之前就被提出了,但是直到AlexNet的出现才将其发扬光大。
(2)训练时使用Dropout随机忽略一部分神经元,以避免模型过拟合。Dropout虽有单独的论文论述,但是AlexNet将其实用化,通过实践证实了它的效果。在AlexNet中主要是最后几个全连接层使用了Dropout。
(3)在CNN中使用重叠的最大池化。此前CNN中普遍使用平均池化,AlexNet全部使用最大池化,避免平均池化的模糊化效果。并且AlexNet中提出让步长比池化核的尺寸小,这样池化层的输出之间会有重叠和覆盖,提升了特征的丰富性。
(4)提出了LRN层,对局部神经元的活动创建竞争机制,使得其中响应比较大的值变得相对更大,并抑制其他反馈较小的神经元,增强了模型的泛化能力。
(5)使用CUDA加速深度卷积网络的训练,利用GPU强大的并行计算能力,处理神经网络训练时大量的矩阵运算。AlexNet使用了两块GTX 580 GPU进行训练,单个GTX 580只有3GB显存,这限制了可训练的网络的最大规模。因此作者将AlexNet分布在两个GPU上,在每个GPU的显存中储存一半的神经元的参数。因为GPU之间通信方便,可以互相访问显存,而不需要通过主机内存,所以同时使用多块GPU也是非常高效的。同时,AlexNet的设计让GPU之间的通信只在网络的某些层进行,控制了通信的性能损耗。
(6)数据增强,随机地从256256的原始图像中截取224224大小的区域(以及水平翻转的镜像),相当于增加了2*(256-224)^2=2048倍的数据量。如果没有数据增强,仅靠原始的数据量,参数众多的CNN会陷入过拟合中,使用了数据增强后可以大大减轻过拟合,提升泛化能力。进行预测时,则是取图片的四个角加中间共5个位置,并进行左右翻转,一共获得10张图片,对他们进行预测并对10次结果求均值。同时,AlexNet论文中提到了会对图像的RGB数据进行PCA处理,并对主成分做一个标准差为0.1的高斯扰动,增加一些噪声,这个Trick可以让错误率再下降1%。
模型特点
- 使用了ReLU激活函数
- 使用了最大池化层
- 标准化
- Dropout
VGG
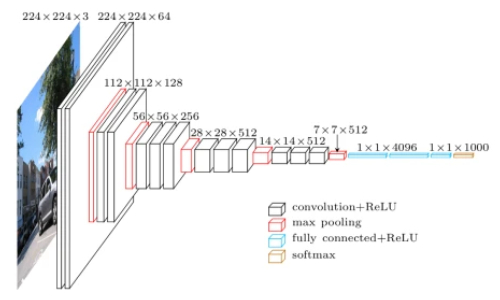
VGG模型是2014年ILSVRC竞赛的第二名,第一名是GoogLeNet。但是VGG模型在多个迁移学习任务中的表现要优于GoogLeNet。而且,从图像中提取CNN特征,VGG模型是首选算法。它的缺点在于,参数量有140M之多,需要更大的存储空间。但是这个模型很有研究价值。
模型的名称——“VGG”代表了牛津大学的Oxford Visual Geometry Group,该小组隶属于1985年成立的Robotics Research Group,该Group研究范围包括了机器学习到移动机器人。下面是一段来自网络对同年GoogLeNet和VGG的描述:
“GoogLeNet和VGG的Classification模型从原理上并没有与传统的CNN模型有太大不同。大家所用的Pipeline也都是:训练时候:各种数据Augmentation(剪裁,不同大小,调亮度,饱和度,对比度,偏色),剪裁送入CNN模型,Softmax,Backprop。测试时候:尽量把测试数据又各种Augmenting(剪裁,不同大小),把测试数据各种Augmenting后在训练的不同模型上的结果再继续Averaging出最后的结果。”
需要注意的是,在VGGNet的6组实验中,后面的4个网络均使用了pre-trained model A的某些层来做参数初始化。虽然提出者没有提该方法带来的性能增益。先来看看VGG的特点:
- 小卷积核。作者将卷积核全部替换为3x3(极少用了1x1);
- 小池化核。相比AlexNet的3x3的池化核,VGG全部为2x2的池化核;
- 层数更深特征图更宽。基于前两点外,由于卷积核专注于扩大通道数、池化专注于缩小宽和高,使得模型架构上更深更宽的同时,计算量的增加放缓;
- 全连接转卷积。网络测试阶段将训练阶段的三个全连接替换为三个卷积,测试重用训练时的参数,使得测试得到的全卷积网络因为没有全连接的限制,因而可以接收任意宽或高为的输入。
GoogLeNet
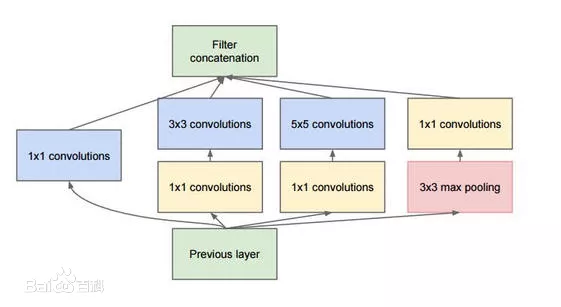
GoogLeNet是2014年Christian Szegedy提出的一种全新的深度学习结构,在这之前的AlexNet、VGG等结构都是通过增大网络的深度(层数)来获得更好的训练效果,但层数的增加会带来很多负作用,比如overfit、梯度消失、梯度爆炸等。inception的提出则从另一种角度来提升训练结果:能更高效的利用计算资源,在相同的计算量下能提取到更多的特征,从而提升训练结果。
模型特点
- 使用不同大小的卷积核,从而感受不同范围的视野
ResNet(深度残差网络)※
这里单独将ResNet新开一个章节,已经表明了他在这一领域的重要性。首先来看看ResNet在2015年的战绩:
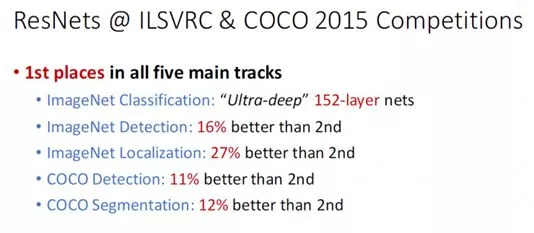
从经验来看,网络的深度对模型的性能至关重要,当增加网络层数后,网络可以进行更加复杂的特征模式的提取,所以当模型更深时理论上可以取得更好的结果,但是更深的网络其性能一定会更好吗?实验发现深度网络出现了退化问题(Degradation problem):网络深度增加时,网络准确度出现饱和,甚至出现下降。56层的网络比20层网络效果还要差。这不会是过拟合问题,因为56层网络的训练误差同样高。我们知道深层网络存在着梯度消失或者爆炸的问题,这使得深度学习模型很难训练。但是现在已经存在一些技术手段如BatchNorm来缓解这个问题。因此,出现深度网络的退化问题是非常令人诧异的。但是何恺明发明的ResNet有效的解决了这一问题。ResNet有效解决了深度CNN模型难训练的问题(网络太深了容易发生梯度弥散)
ResNet残差网络主要是通过残差块组成的,在提出残差网络之前,网络结构无法很深,在VGG中,卷积网络达到了19层,在GoogLeNet中,网络达到了22层。随着网络层数的增加,网络发生了退化(degradation)的现象:随着网络层数的增多,训练集loss逐渐下降,然后趋于饱和,当你再增加网络深度的话,训练集loss反而会增大。而引入残差块后,网络可以达到很深,网络的效果也随之变好。
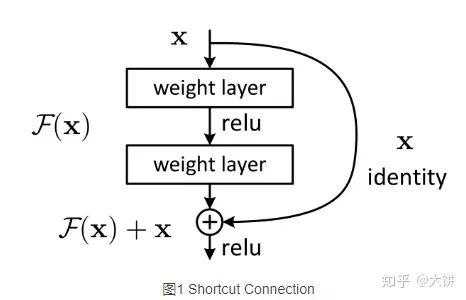
这里提供了一种想法:既然深层网络相比于浅层网络具有退化问题,那么是否可以保留深层网络的深度,又可以有浅层网络的优势去避免退化问题呢?如果将深层网络的后面若干层学习成恒等映射 ,那么模型就退化成浅层网络。但是直接去学习这个恒等映射是很困难的,那么就换一种方式,把网络设计成:
只要 就构成了一个恒等映射 ,这里 为残差。
相关资料链接:深度学习之16——残差网络(ResNet)
PyTorch 残差块实现
1 | class ResBlk(nn.Module): |
DenseNet
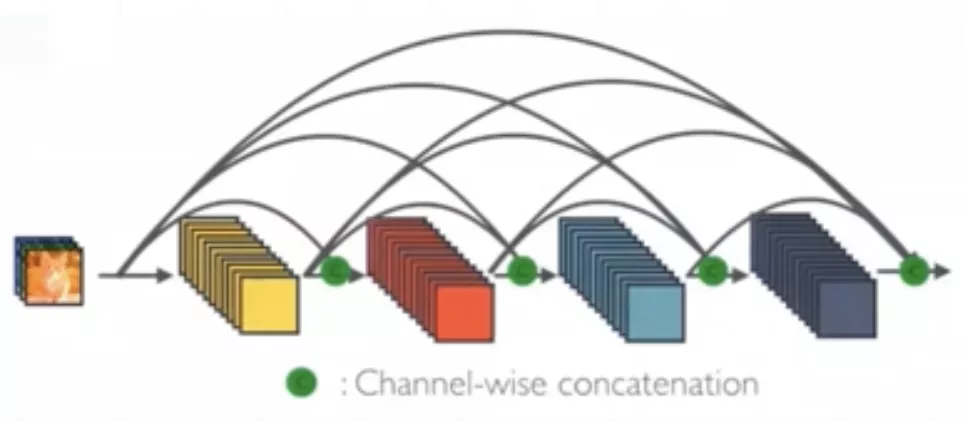
其实相当于每一层都和前面所有层之间又一个shortcut
nn.Module
PyTorch中的nn.Module类为所有我们自定义网络层的一个父类!所以他非常的重要,以下是他的优点
提供了很多的操作
-
nn.Linear -
nn.BatchNorm2d -
nn.Conv2d
etc.
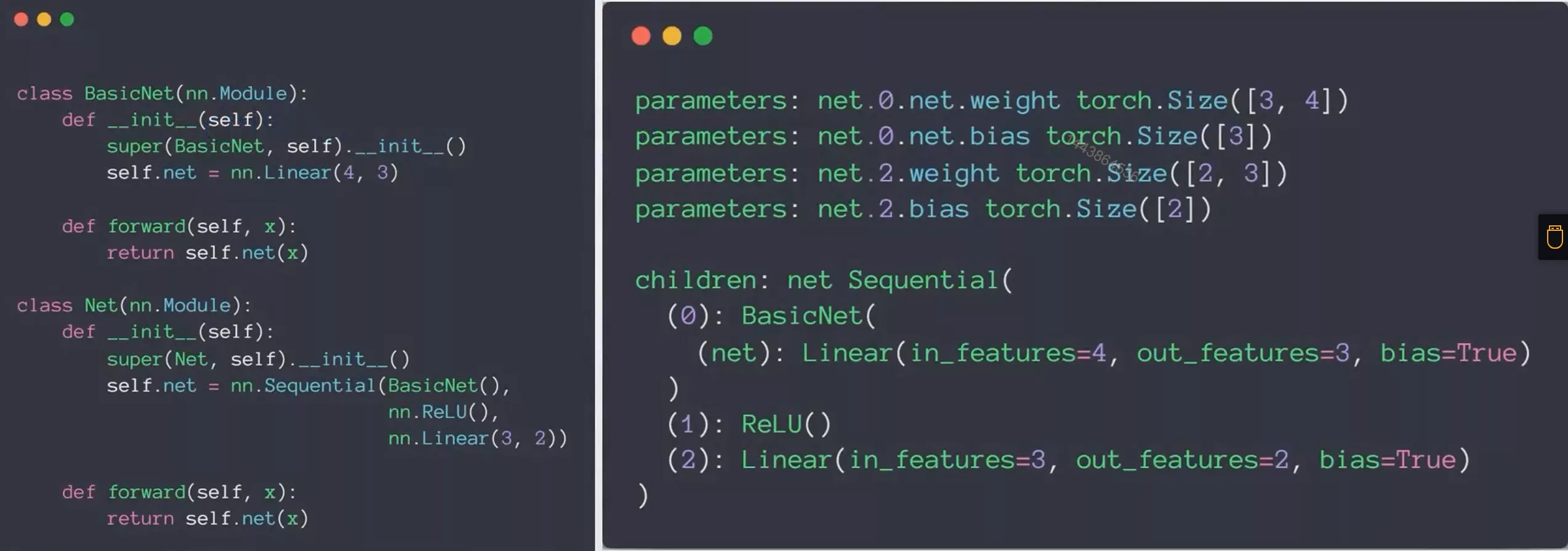
提供容器nn.Sequential
对网络参数能够进行很好的管理
下面举一个例子,我们采用的是一个两层的网络,所以参数有4组,weight0,bias0,weight1,bias1
1 | In [3]: import torch.nn as nn |
可以清晰的查看网络结构
可以将网络方便的转移到GPU上进行加速
1 | device=torch,device('cuda') |
可以很方便的保存和加载网络的中间状态
这就方便我们进行early stop
1 | device=torch,device('cuda') |
方便切换网络状态
对于网络中的一些层,比如BatchNorm层,他在训练状态下和测试状态下的行为是有一些差异的,如果我们对网络中的每一层都去执行切换状态的操作是非常麻烦的,但是nn.Module支持对自定义网络整体状态的切换,大大简化了操作。
1 | device = torch.device('cuda') |
方便定义自己的类
比如说PyTorch现目前暂时不提供将tensor拍平的操作(层之间,作用是将卷积层转化为全连接层),因此这个层需要我们自己去实现
1 | class Flatten(nn.Module): |
以上这个类使用的非常的广泛
我们也可以尝试自己写一个Linear类
1 | class MyLinear(nn.Module): |
数据增强
其实非常好理解,数据增强让有限的数据产生更多的数据,增加训练样本的数量以及多样性(噪声数据),提升模型鲁棒性,一般用于训练集。神经网络需要大量的参数,许许多多的神经网路的参数都是数以百万计,而使得这些参数可以正确工作则需要大量的数据进行训练,但在很多实际的项目中,我们难以找到充足的数据来完成任务。随机改变训练样本可以降低模型对某些属性的依赖,从而提高模型的泛化能力。
常用的数举增强方法有
- 翻转
- 旋转
- 随机移动和裁剪
- 加噪
- GAN
翻转(Flip)

PyTorch 实现
1 | train_loader=torch.utils.dataDataLoader( |
transform是torchvision中提供的操作
旋转(Rotate)

PyTorch实现
1 | train_loader=torch.utils.dataDataLoader( |
缩放(scale)

PyTorch 实现
1 | train_loader=torch.utils.dataDataLoader( |
随机移动和裁剪(Crop part)
PyTorch 实现
1 | train_loader=torch.utils.dataDataLoader( |
一般进行数据增强是RandomRotation和RandomCrop结合起来一起使用的
加噪(Noise)
总结
虽然数据增强确实可以提高模型的表现,但是他不会帮助太多。